Computational empathy for coherent control
ΔE is an adaptive empathic regulator that keeps a system synchronized with a user's physiological, behavioral and contextual signals — reducing variance and jerk while preserving individual stability in real time.
Status Provisional patent filed · 2025
What is ΔE 4.2 (Precision Horizon)?
ΔE moves beyond error-minimization filters by introducing empathic regulation — a feedback process that maintains coherence between user signals and the system state. The 4.2 generation extends horizon-aware blending (fast/slow loops) with improved damping, context weighting and anti-jerk safeguards under delayed / missing feedback.
Applications
- Wearables & wellbeing interfaces (HRV/EDA/Temp/Motion)
- HCI/AR/VR attention alignment & adaptive UI
- Driver assist / fatigue mitigation
- Robotics & exoskeleton comfort control
- Neuroadaptive training / cognitive load regulation
Core idea · horizon‑aware ΔE
A compact view of the control step with behavioral term and context weights.
Inputs: multimodal signals (HRV, EDA, Motion, Context) with per-modality quality weights
Robust aggregation ← fused A*(t) across modalities
Adaptive inertia ← μ_t from surprise |A* − y_{t−1}|
Soft centering ← λ_t toward personal baseline c
Candidate y_t(θ) ← blend of y_{t−1}, A*(t), centering
Damping & anti‑jerk ← limit rate & acceleration
Output y_t (ΔE state) ← clipped [0..1]; feedback closes the loop
In compact form (public sketch):
y_t = f(A*_t, y_{t-1}; μ_t, λ_t, θ | context, behavior)
where behavior modulates centering and damping to preserve user‑specific stability
while context weights reconcile modality quality and latency.
Architecture layers (brief)
robustness, falsification guards, drift handling
context weighting, signal quality, horizon
damping, anti-jerk, centrality error
+------------------+
| Inputs (HRV/EDA) |--\
+------------------+ \ +-------------------+ +--------------------+
| Motion/Context |---->---->| Robust aggregation |---->| Adaptive inertia |--+
+------------------+ / +-------------------+ +--------------------+ |
| Quality weights |--/ | |
+--------------------+
| Soft centering |
+--------------------+
|
+-----------------+-----------------+
| Candidate y_t(θ), horizon blend |
+-----------------+-----------------+
|
+----------------------------+
| Damping & anti‑jerk |
+----------------------------+
|
Output y_t [coherent state]
ΔE 4.2 — Key Figures
Benchmark plots for ΔE 4.2 — run across N users and M sessions, including stress conditions (spikes, lags, flips, dropouts). Compared against KalmanAda and EWMA.
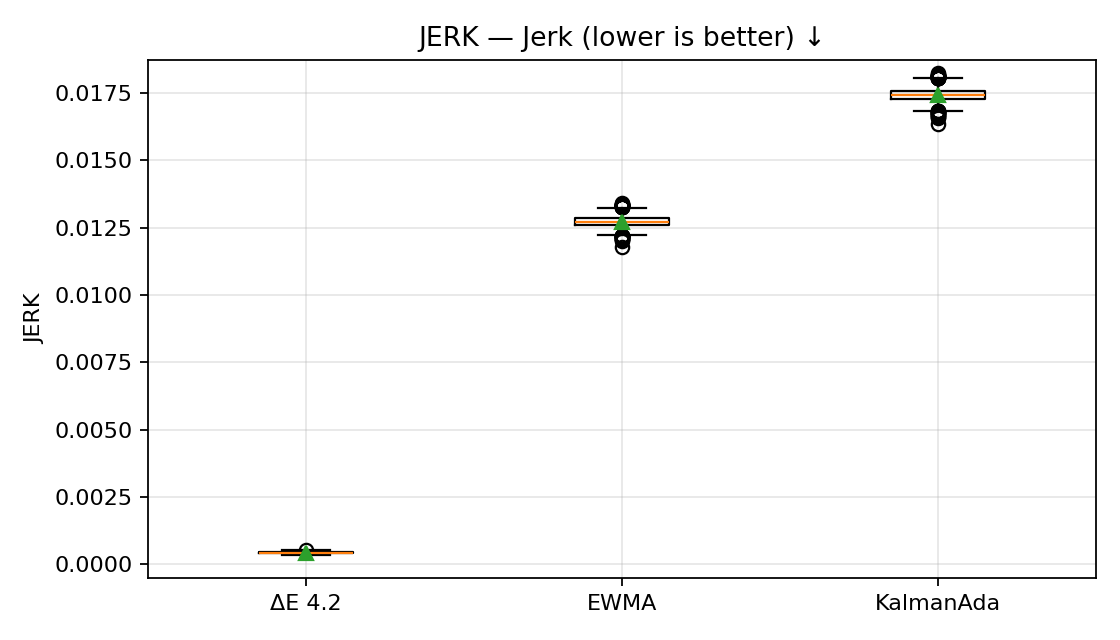 Figure 1
Figure 1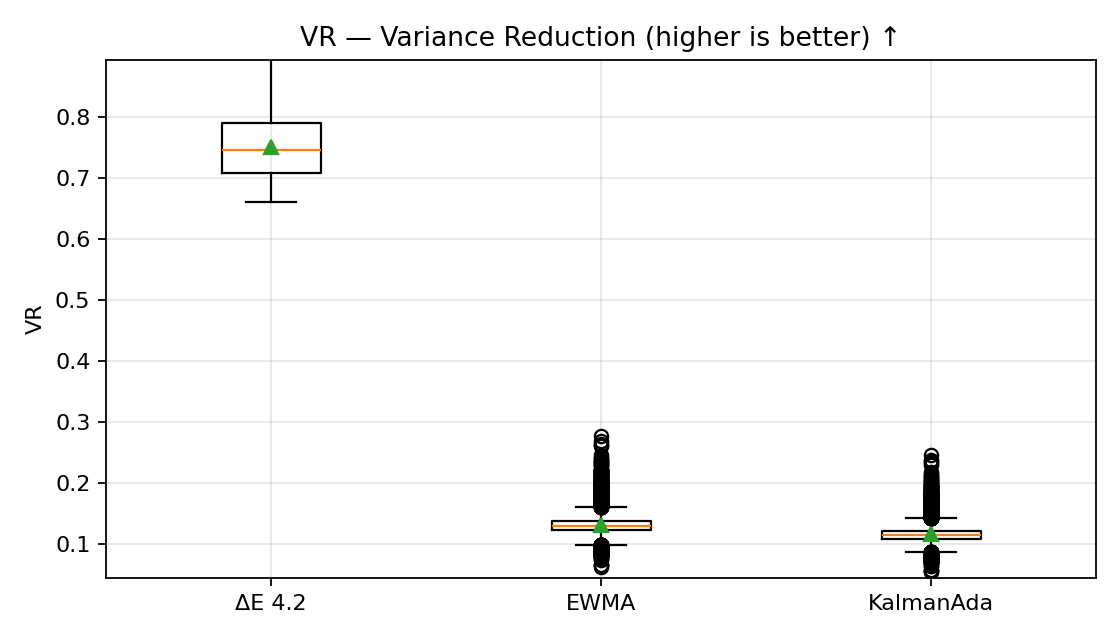 Figure 2
Figure 2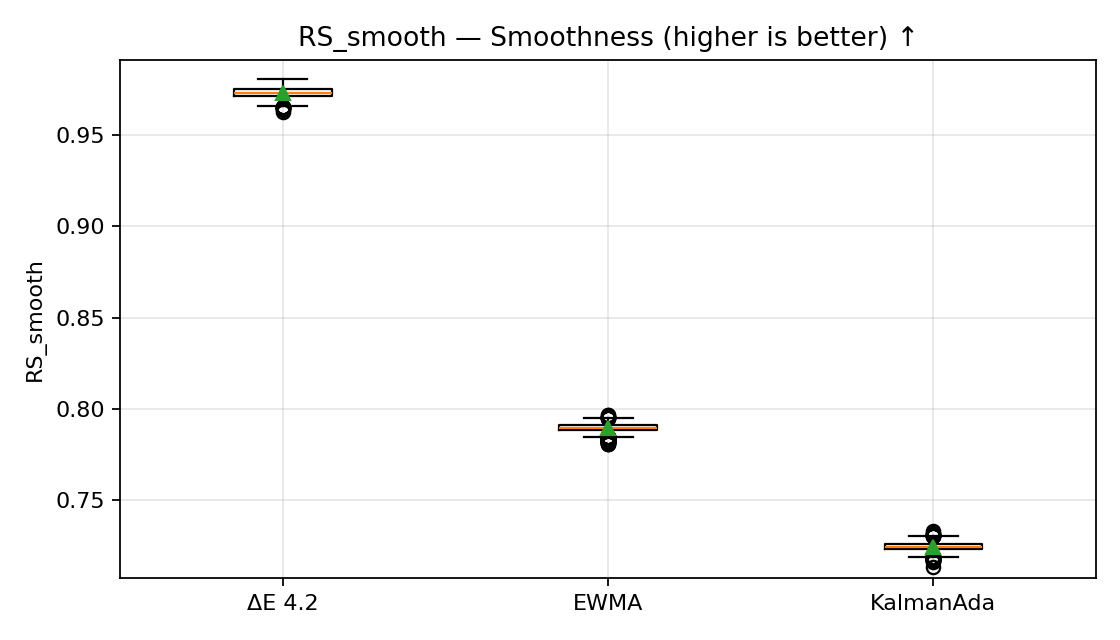 Figure 3
Figure 3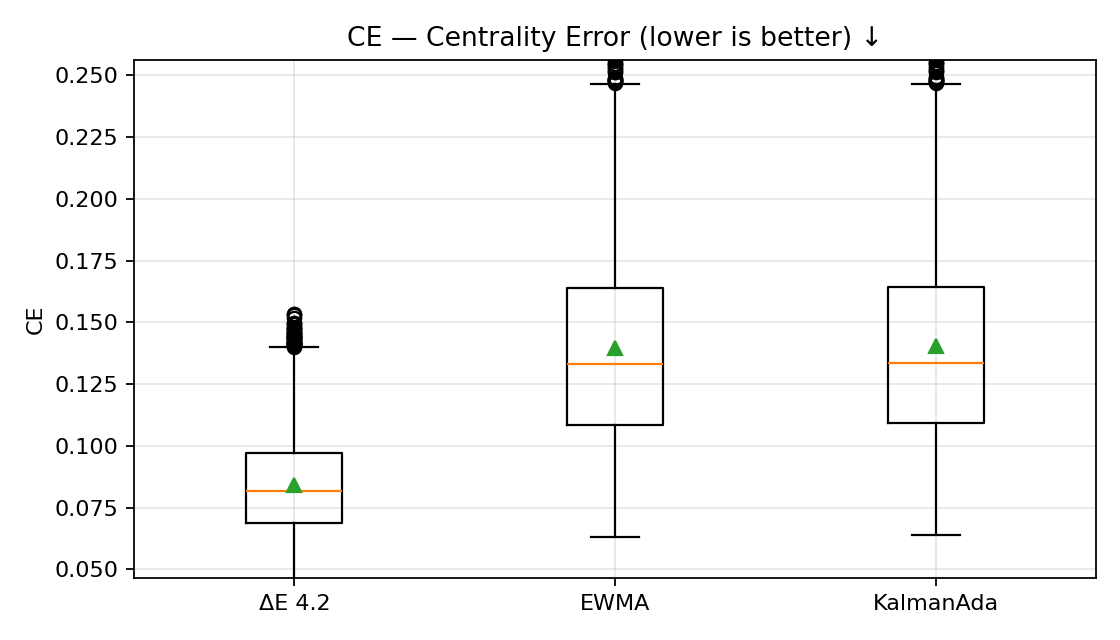 Figure 4
Figure 4Contacts
Maxim Barzenkov — founder of Petronus / Synthetic Conscience protocol (Poznań, Poland).
“ΔE is a model of adaptive empathic regulation and coherent control. Part of the Synthetic Conscience architecture — the missing layer between intelligence and meaning. Provisional patent filed.”
✉️ contact@petronus.eu · Poznań / Remote
© 2025 Petronus / Synthetic Conscience Project. All rights reserved. Public site: no code, no datasets, no downloads.